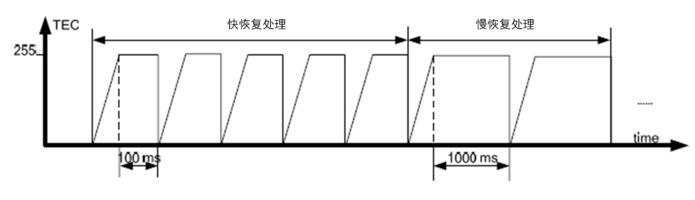
当 CAN 控制器的发送错误计数器TEC>255 时,CAN 控制器进入Bus-Off 状态。进入Bus-Off 后节点的处理模式有两种:快恢复处理模式和慢恢复处理模式。
快恢复处理模式流程:
- 停止所有 CAN 通信100 ms;
- 100 ms 过后立即复位CAN 通道,清空发送和接收错误计数器;
- 恢复 CAN 网络通信。
慢恢复处理模式流程:
- 停止所有 CAN 通信1000 ms;
- 1000 ms 过后立即复位CAN 通道,清空发送和接收错误计数器;
- 恢复 CAN 网络通信。
如图所示,快恢复处理模式最多只允许连续执行5 次,如果连续执行完5 次快恢复处理后,节点仍然进入Bus-Off 状态,则必须执行慢恢复处理模式,慢恢复处理模式可以持续执行到故障解除。
在以下特殊情况时,可进行特殊处理:
对报文的实时性有很高要求,不允许报文重发场合
这种应用情况下,应该使用CAN报文的单次发送,不允许重发,并且只要发送错误计数器或者接收错误计数器发生计数,则立即清空错误计数。
不允许接收丢帧场合
这种情况下,不但TEC发送计数如果计数到255要进行错误处理,而且REC接收错误计数器如果计数到96(错误告警)时,也要等同于总线关闭进行错误处理。

